



¿Puede el mercado emergente de la robótica humanoide ofrecer una nueva generación de unicornios? ¿O es una promesa prematura, con enormes retos técnicos, regulatorios y comerciales por delante? Analistas financieros e inversores de fondos de capital privado y fondos de inversión siguen con atención el desarrollo de la tecnología de los robots humanoides (RHs), no sólo por la posibilidad de encontrar atractivas oportunidades de inversión, pero también por el impacto transversal que esta tecnología puede tener sobre las industrias de manufactura y servicios. Los economistas, por su parte, examinan las implicaciones de esta tecnología en términos de competencia entre regiones y países, por la posibilidad de una eventual relocalización de la actividad industrial, así como sus efectos sobre la productividad y el mercado laboral.
Los robots industriales no humanoides nos han acompañado desde hace décadas en las líneas de montaje de la industria manufacturera, en el ámbito logístico, en el mundo agrícola, en sanidad y en otros entornos, contribuyendo a incrementar la productividad. Sin embargo, en la tecnología de la robótica humanoide existía una enorme brecha entre lo que el mercado mostraba técnicamente en pruebas piloto y lo que comercialmente resultaba viable a gran escala. Las capacidades de los prototipos acaparaban titulares mientras los productos de serie distaban de ofrecer un rendimiento consistente, fiable y económicamente justificable en entornos reales. (1)
Hoy los RHs son capaces de transportar materiales de manera autónoma, reconocer personas y objetos, mantener conversaciones relativamente naturales, recopilar datos en tiempo real y colaborar en tareas básicas de asistencia o guía. Diversos indicios sugieren que podríamos estar a las puertas de una revolución en la robótica humanoide como resultado del salto en las capacidades y la reducción en los costes de producción. La carrera internacional por liderar el desarrollo del robot humanoide de propósito general (general-purpose humanoid robot, GPHR) está en marcha. No se trata ya de construir sistemas mecánicos sofisticados, sino de desarrollar plataformas de inteligencia artificial materializada —Embodied AI— capaces de aprender, adaptarse y desenvolverse en la complejidad de entornos concebidos para el ser humano. La transición hacia los GPHRs supone abandonar el control estrictamente programado en favor de sistemas basados en la observación: modelos de aprendizaje por imitación que permiten a los RHs adquirir nuevas habilidades observando a un humano ejecutar una tarea mediante teleoperación o entornos de realidad virtual. Al tiempo, los grandes modelos de comportamiento (LBMs) permiten traducir instrucciones verbales complejas en secuencias coordinadas de acciones físicas. Estos sistemas incorporan, además, mecanismos de detección de anomalías y son capaces de identificar situaciones de riesgo o emergencia y reaccionar en tiempo real para garantizar la seguridad. En este contexto, diversos ámbitos de discusión permanecen abiertos.
Una cuestión central en la robótica avanzada es por qué los robots deberían adoptar una forma humanoide. En un mundo diseñado y construido por y para los seres humanos los RHs pueden maximizar su utilidad al desenvolverse en entornos físicos existentes (edificios, controles, puertas o escaleras) sin necesidad de rediseñar la infraestructura: la forma humanoide permite a los robots adaptarse a una amplia gama de tareas -caminar, manipular objetos o emplear herramientas diseñadas para manos humanas-. Esta flexibilidad confiere versatilidad en entornos no estructurados, ampliando significativamente su utilidad práctica (2). Una opción alternativa consistiría en rediseñar los entornos para permitir que robots no humanoides operen con eficacia dado que la tecnología necesaria para que los RHs caminen con estabilidad, manipulen objetos y reaccionen al entorno real sigue siendo costosa. La locomoción bípeda y la manipulación precisa continúan siendo desafíos abiertos en la investigación robótica. Robots con ruedas, plataformas modulares o cuadrúpedos pueden, en muchos casos, cumplir funciones similares con menor complejidad técnica. Los defensores del diseño antropomórfico sostienen, sin embargo, que la cuestión no es únicamente técnica: también afecta al grado de aceptación por parte de los usuarios. Aunque todos los robots pueden integrar razonamiento visual y contextual mediante inteligencia artificial generativa multimodal, la forma humana facilita la interacción con personas, especialmente en entornos de asistencia social, educación o atención al cliente, al aprovechar señales no verbales, gestos y una percepción intuitiva de la intención del usuario. La apariencia del robot, en suma, influye decisivamente en la interacción humano-robot (3).
Que en los próximos años se produzca un despliegue masivo de humanoides avanzados en empresas y hogares, dependerá tres factores: la demanda, la posibilidad de fabricación a precio asequible y la capacidad de operación sostenida.
En términos de demanda, numerosos países afrontan déficits estructurales de mano de obra en sectores clave y la automatización convencional no logra cubrir adecuadamente esta brecha. La demanda de RHs se verá impulsada por: i) las dinámicas demográficas: el envejecimiento poblacional, la reducción de la fuerza laboral y las vacantes persistentes en manufactura, logística, agricultura, servicios sociales, sanidad y defensa; ii) la urbanización concentra el talento en las ciudades y deja carencias en áreas rurales; y iii) ciertos cambios en las preferencias laborales. (4) No obstante, el nivel de adopción en empresas, espacios públicos y hogares puede resentirse ante: el riesgo de que fallos mecánicos o de software causen daños a las personas; el recelo ante la posible recopilación almacenamiento y uso de datos personales (mediante cámaras, sensores y micrófonos); el rechazo al seguimiento de movimientos y actividades; y la desconfianza hacia decisiones autónomas de las máquinas por la falta de transparencia en el funcionamiento de los algoritmos y posibles errores. Además, la colaboración estrecha entre personas y humanoides requiere de arquitecturas de seguridad multicapa que combinan visión, detección táctil, detección de proximidad y actuación con limitación de fuerza. Ciertos estudios sobre percepción social y diseño antropomórfico han puesto de relieve la existencia del llamado valle inquietante (uncanny valley): robots que se asemejan mucho a los humanos, pero sin alcanzar una imitación plena, pueden generar rechazo o malestar en las personas, afectando su aceptación, incluso cuando son técnicamente competentes (5). A medida que los robots avanzan en complejidad y autonomía, se hace necesario establecer un marco regulatorio que defina estándares de calidad y seguridad. Sin estas referencias, la adopción generalizada podría verse limitada por riesgos técnicos, legales y sociales. Está en fase de borrador la norma ISO/WD 25785-1 (Robotics — Part 1: Safety requirements for dynamically stable industrial mobile robots), que definirá los requisitos de seguridad para robots móviles industriales con estabilidad dinámica controlada activamente.
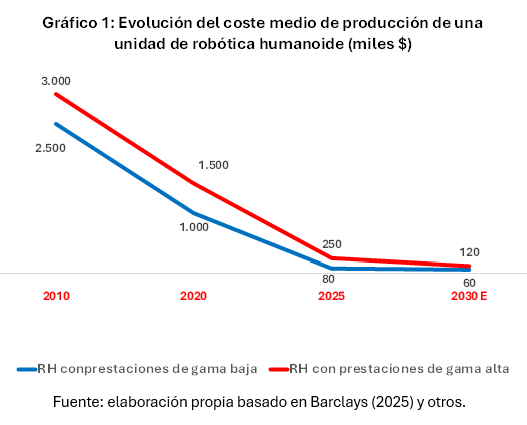
El coste de producción de los robots humanoides ha registrado un descenso espectacular la última década. Se han abaratado los componentes relacionados con la ‘fuerza’ y las capacidades cognitivas. Se ha producido una reducción de hasta ocho veces en el coste de las baterías de litio como resultado de las economías de escala por el aumento masivo de la producción y el avance a lo largo de la curva de aprendizaje. Se espera que este proceso continúe. Véase gráfico 1.
Por otra parte, el desarrollo de sistemas de robot-as-a-service (RaaS) podría convertirse en un factor clave para estimular la demanda, al facilitar el acceso a robots avanzados sin requerir inversiones de capital elevadas.
El tercer factor que determinará el nivel de adopción de humanoides está vinculado con la amortización de su coste, lo que depende de la capacidad de operación sostenida. Un aspecto relacionado a su vez con el rendimiento y la autonomía de las baterías. En todo caso, los RHs pueden no estar inactivos: además de usar sistemas de carga rápida durante los descansos planificados o los cambios de turno, pueden utilizar paquetes de baterías intercambiables. Gracias a las aplicaciones IA, los robots pueden por sí mismos sustituir autónomamente sus baterías. Los diseños actuales de humanoides consideran el siguiente trade off. Las baterías de mayor energía prolongan la autonomía aumentando el riesgo térmico y requiriendo mayor protección, mientras que composiciones químicas más seguras ofrecen mayor vida útil pero menor capacidad (6). A medio plazo serán críticos los avances en baterías de estado sólido, que ofrecen mejoras en densidad energética, seguridad (eliminan electrolitos líquidos inflamables) y mayor velocidad carga.
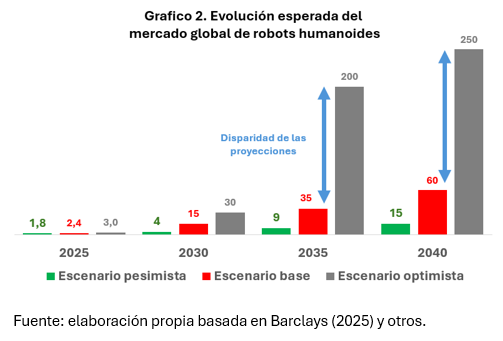
El tamaño actual del mercado de los robots humanoides se estima en un rango entre 1.8 y 2.4 mil millones de dólares. Las proyecciones para 2035 ofrecen una enorme dispersión. No existe consenso sobre la trayectoria de la adopción de esta tecnología. Algunos líderes del mundo tecnológico como Elon Musk o Jensen Huang señalan que los humanoides están en “momento tipo ChatGPT” y podrían formar parte de la vida cotidiana de forma masiva en un plazo de tres a cinco años. Otros como Rodney Brooks, Ken Goldberg o Reyk Knuhtsen subrayan que la tecnología aún es inmadura en términos de versatilidad y coste-eficacia y que los humanoides se introducirán gradualmente en tareas de bajo riesgo y entornos tolerantes a errores. En un escenario pesimista el mercado alcanzaría en 2025 los 9 mil millones de dólares, mientras que un escenario optimista dispara el tamaño de mercado hasta 200 mil millones.
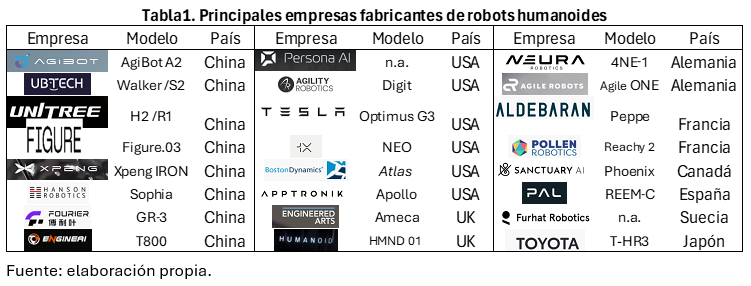
En la actualidad, China domina el despliegue y la fijación de precios en la industria de la robótica humanoide, con un 70 % de los nuevos humanoides procedentes de ese país (4). China posee una enorme capacidad industrial para fabricar hardware complejo y barato, y controla buena parte de la cadena de suministro de baterías, motores, actuadores y electrónica. La carrera entre China y Estados Unidos en los ámbitos de inteligencia artificial y robótica está en marcha. En el terreno de los robots humanoides, Estados Unidos lidera en los componentes intangibles: modelos fundacionales, software, chips, ecosistemas de venture capital y capacidad de convertir prototipos en plataformas globales. Véase Tabla 1.
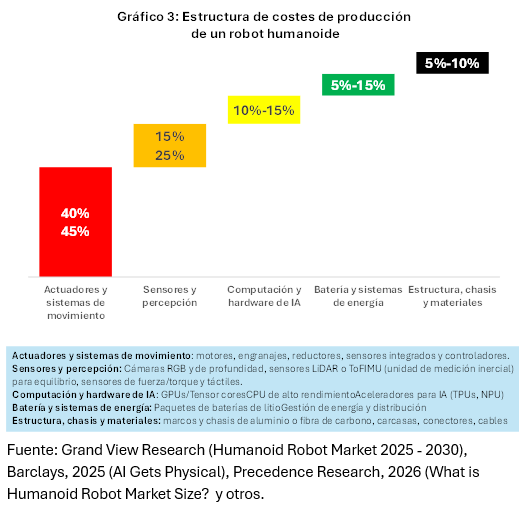
Europa no es especialmente competitiva en inteligencia artificial, pero el software para robots humanoides – algoritmos de equilibrio, locomoción, manipulación de objetos, reconocimiento de voz, visión por computador, planificación de tareas, aprendizaje automático y otros- ha reducido su participación en los costes totales de fabricación. Por el contrario, en torno al 50% del coste de un robot está relacionado con motores para articulaciones, mecanismos de fuerza, cámaras, LIDAR, sensores de fuerza/par, giroscopios, acelerómetros, sensores de proximidad, estructura y chasis entre otros. Véase Gráfico 3.
Europa dispone de una sólida industria automovilística que ofrece un “manual de buenas prácticas” directamente aplicable a la escalabilidad de los humanoides (con miles de componentes de precisión, fabricación multinivel y experiencia en precisión mecánica y fiabilidad). Aunque, la inteligencia artificial física es intensiva en minerales estratégicos: tierras raras y CLANC -cobre, litio, aluminio, níquel y cobalto- y cerca del 90 % de las tierras raras magnéticas siguen dependiendo de China, la capacidad automotriz europea debería darle cierta ventaja competitiva. Existe coincidencia en que la oportunidad europea está en construir humanoides industriales fiables, regulados, integrados en sectores donde ya es fuerte.
(1). Kelkar, A., Jansen, C. y Patel, M. (2025) Humanoid robots: Crossing the chasm from concept to commercial reality. McKinsey and Company.
(2).- Saeedvand, S., Jafari, M., Aghdasi, H. S. y Baltes, J. (2019) “A comprehensive survey on humanoid robot development”, The Knowledge Engineering Review, 34, e20.
(3). Vernon, D. y Sandini, G. (2024) “The Importance of Being Humanoid”, International Journal of Humanoid Robotics, 21 (01).
(4). Barclays (2025) AI Gets Physical: AI-powered humanoid robots are set to augment the workforce. Impact Series, 14.
(5). Folgheraiter, M. y Aubakir, B. (2018) “Design and Modeling of a Lightweight and Low Power Consumption Full-Scale Biped Robot”, International Journal of Humanoid Robotics, 15 (05).
(6). Kóczi, D. y Sárosi, J. (2025) “Safety Engineering for Humanoid Robots in Everyday Life—Scoping Review”, Electronics, 14(23), 4734.